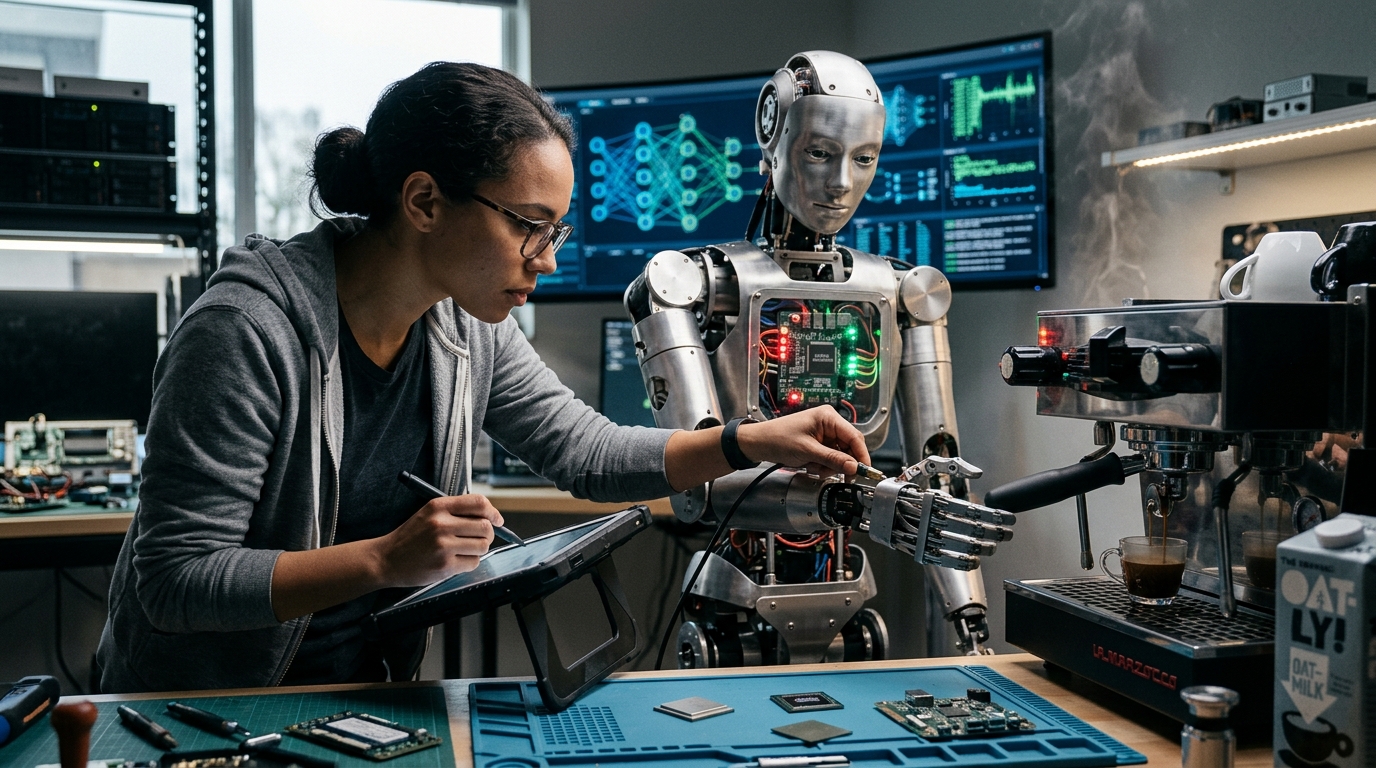
In the sterile, brightly lit laboratories of Silicon Valley, a new kind of choreography is unfolding. It isn’t an avant-garde performance, but rather the most critical phase in the development of Embodied Artificial Intelligence. Humans, donned in virtual reality headsets and haptic feedback suits, move methodically through mundane tasks: grasping a ceramic mug, pressing a button on an espresso machine, folding a warm towel. A few feet away, metallic skeletons with high-precision actuators mimic every gesture in real-time. These are the robot puppeteers, and their work is the bridge between digital code and the physical world.
The Shift from Hard-Coding to Imitation
For decades, robotics relied on rigid, rule-based programming. If a robot needed to pick up an object, an engineer had to write thousands of lines of code defining exact coordinates, grip strength, and arm trajectories. This approach invariably failed in the face of the unpredictable—a messy kitchen or a slightly misplaced cup. Today, companies like Figure AI, 1X, and Sanctuary AI are pivoting toward "Imitation Learning."
This process, known as teleoperation, allows AI to "see" and "feel" how a human solves a physical problem. Every time a trainer makes a cup of coffee through the robot’s interface, the system records terabytes of data from motion sensors, depth cameras, and tactile sensors. These data points feed neural networks that learn to generalize: the robot isn't just learning to move its hand to point X; it is learning the conceptual physics of "grip" and "resistance."
Moravec’s Paradox and the Coffee Challenge
In the world of computer science, Moravec’s Paradox states that high-level reasoning (like playing chess) requires very little computation, while low-level sensorimotor skills (like a toddler’s walk) require vast resources. Making coffee is the "Holy Grail" of this challenge. It demands fine motor skills to handle fragile items, visual recognition to monitor fluid levels, and the ability to correct errors in real-time.
- Fine Motor Skills: The pressure applied to a paper cup must be precise—enough to hold it, but not enough to crush it.
- Hand-Eye Coordination: The robot must perceive depth and perspective, even when steam from the coffee obscures its visual sensors.
- The Data Bottleneck: Silicon Valley faces a "data drought" in the physical world. While ChatGPT was trained on the vast text of the internet, there is no equivalent database for the nuance of human hand movements.
The Economics of Embodied Labor
The urgency to train these humanoids isn't just about domestic convenience. The real market lies in warehouses and manufacturing lines where labor shortages are a global crisis. These puppeteers aren't just technicians; they are the creators of a new species of "digital blue-collar worker" that can be transferred from task to task with a simple software update.
"We aren't just teaching the robot to make coffee; we are teaching the robot to understand the world through its hands," noted a researcher at Figure AI.
However, the cost remains a significant barrier. A humanoid robot trained this way costs hundreds of thousands of dollars, and the teleoperation process is incredibly labor-intensive. To reach a point where a robot can perform a task it has never seen before, millions of hours of human demonstration are required. This manual side of AI training is the irony of our era: to automate physical labor, we first require thousands of hours of human labor to school the machines.
The Future: From Lab to Living Room
As Vision-Language-Action (VLA) models evolve, the need for the human puppeteer will diminish. Robots will eventually begin to learn by watching YouTube videos or simply observing their owners. The moment a humanoid serves you your morning coffee without any prior specific instruction will mark the definitive convergence of digital intelligence and physical existence. Until then, the silent trainers in Silicon Valley will continue to move their hands through the air, weaving the future of human labor.



